ドローンの練習に必須ともいえるシミュレーター。いくつかシミュレーターはありますが、今回紹介するのは「Real Flight」という製品になります。
ドローンスクールでもほぼこのシミュレーターが導入されていると思います。
この記事の目次
なぜシミュレーターが必要か
ドローンを初めて飛ばしたり、あまり飛ばしたことがない場合、操作に結構手間取る事があります。しかし、GPS付のドローンでは手を離せばその場でホバリングしてくれますので、そこまで怖がる必要はありません。しかし、自分が頭の中で描いたように飛行させるには簡単にはできません。ドローンの動きとして、上下左右、斜めくらいは少し練習すればできると思います。しかし、機体を対面させて斜め移動しながら上昇など、頭で考えてからではないと中々操作が思うようにいかないと思います。実機で練習する環境があればベストですが、バッテリーや飛行場所など全てを実機とすると大変な面もあります。また、天候が悪い日や夜間などは飛行させる事ができません。
実機での経験が最重要ですが、シミュレーターを使った訓練も同時にする事で、上達スピードも早くなります。
Real Flight
Real Flightはラジコンでお馴染みのフタバから出ているソフトウェアになります。2022年6月現在の最新はRF9.5が最新になります。
価格は、公式サイトでは送信機セットで\44,000円 単体で\25,300となります。私は送信機セットを購入しました。すでにプロポをお持ちの方は単体での購入を検討されるといいと思います。

PCの必要スペックは以下の通りです。私はWindows11ですが問題なく動いています。そこまでハイスペックな要求ではないですね。
・DOS/V機
・対応OS:Windows8.1/Windows10
※制限付きユーザーでは、インストールおよび使用はできません。
Administrator(管理者)ユーザーでご使用ください。
・CPU:Pentium2.0GHz(必須)/理想:Dual Core2.4GHz相当以上
・メインメモリ実装:1.0GB以上(必須)/理想:2.0GB以上
・HDD空き容量:10GB以上
・DVDドライブ
・USBポート(Aタイプ)
・SVGA表示可能モニタ(800×600ドット以上の解像度で表示できるモニタ)
・オンラインアップデートまたは、それ以外の理由でインターネット接続の必要がございますので、高速ブロードバンドでインターネット接続可能な環境を推奨します。■グラフィック(表示機能)の環境について(必須)
・DirectX9.0cに100%互換グラフィックチップ(必須)
推奨:Intel HD Graphics4600相当以上(必須)、理想:GeForce GTX1060相当以上
512MB(必須)、理想:1GB以上のビデオメモリ(VRAM)
※DirectX9.0cに100%互換性のあるドライバ(Pixel Shader3.0サポート)が必要です。
・グラフィックチップがオンボードやチップセット内蔵ではなく、ビデオカードの拡張が可能なコンピュータ本体を推奨します。
設定
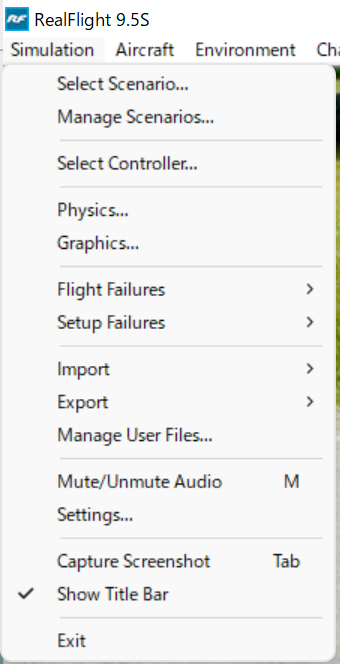
インストール方法は割愛しますが、ソフトウェアを立ち上げると上部にメニューが表示されていると思います。日本語には対応していませんので、英語となります。

Simulation
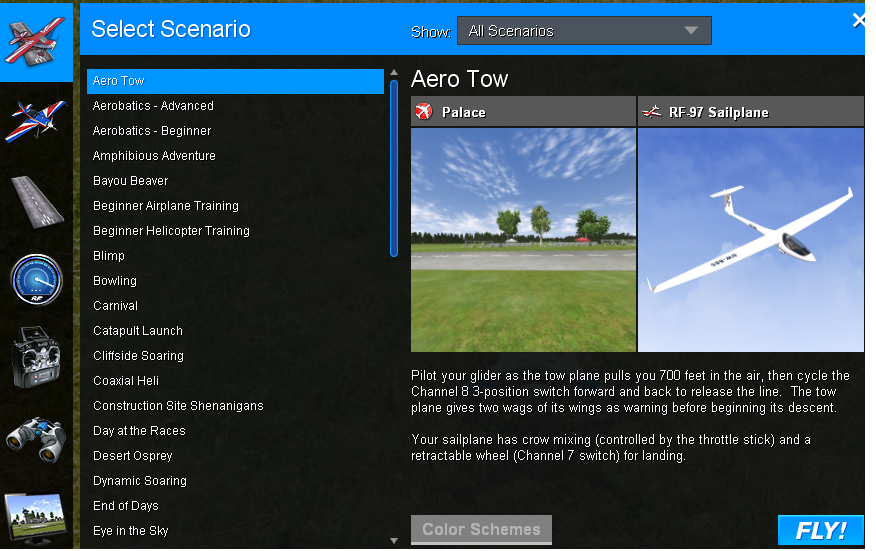
Select Scenario
ここでは、色々なシナリオを選択する事ができます。この記事を見ている方はドローンの練習をメインだと思いますが、他にも飛行機やヘリコプターなど様々な機体・場所などを選択する事ができます。
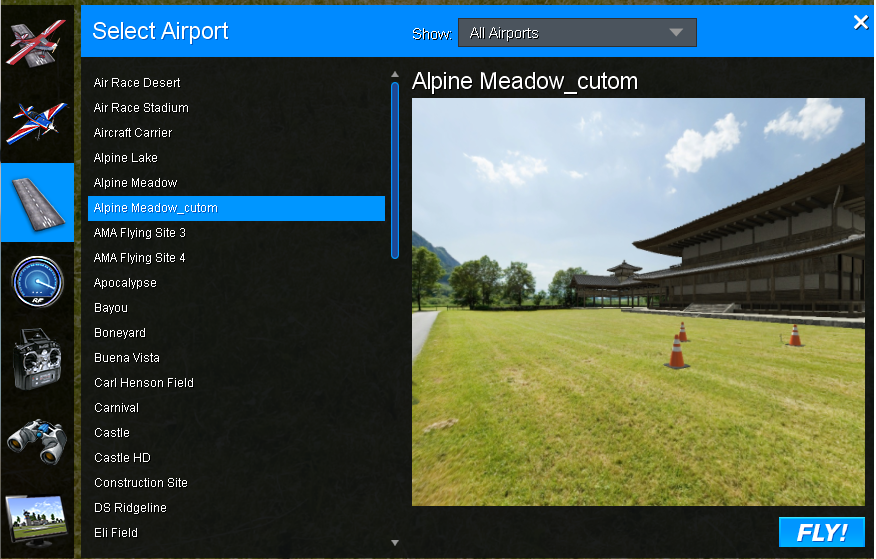
用意された機体と飛行場
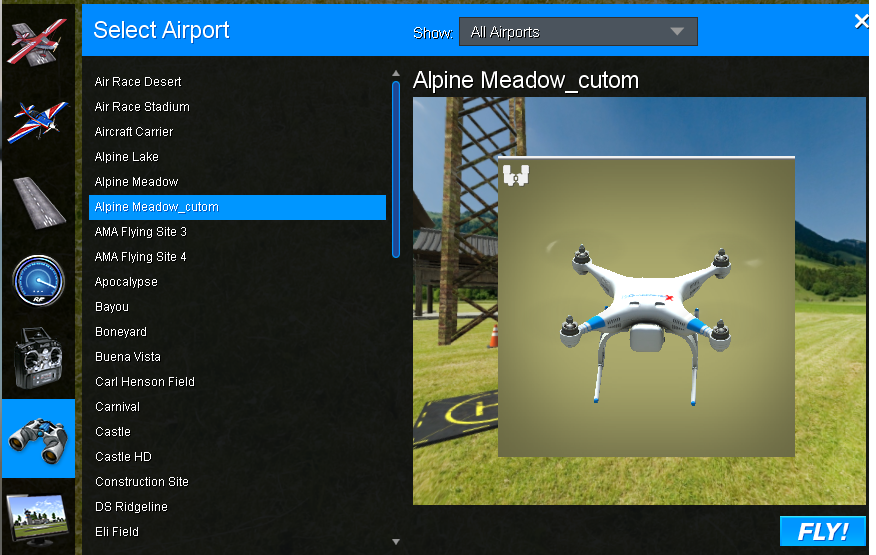
ここでは、機体を選択する事ができます。上段のプルタウンでカテゴリを絞って表示させる事もできます。

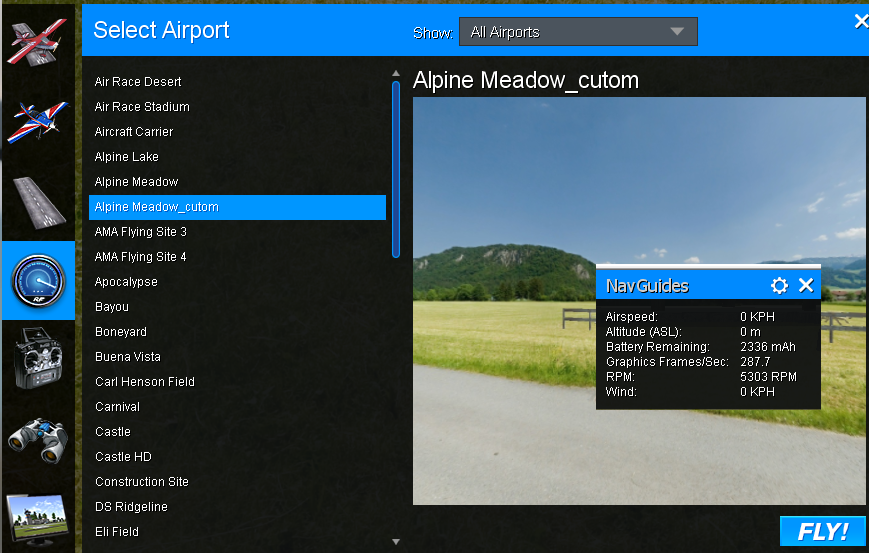
ここで、飛行場所を選択できます。
ここでは、画面右側に出ているような計器を表示させる事ができます。
| Airspeed | 機体の大気速度 |
| Altidude(ASL) | 海抜高度 |
| Battery Reamaing | バッテリー残量 |
| Graphic Frames/Sec | 描画速度 |
| RPM | エンジン回転数 |
| Wind | 風速
PageUP 風速を上げる |
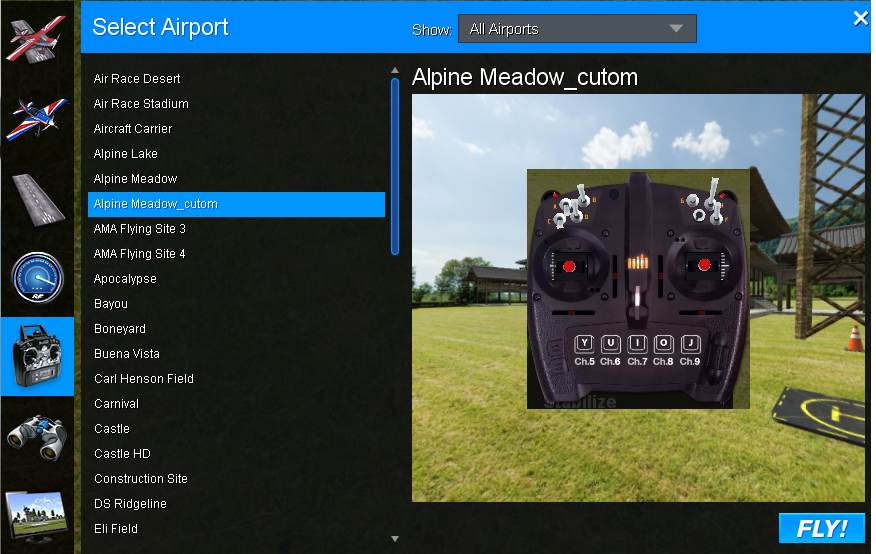
ここではコントローラーの表示をさせる事ができます。
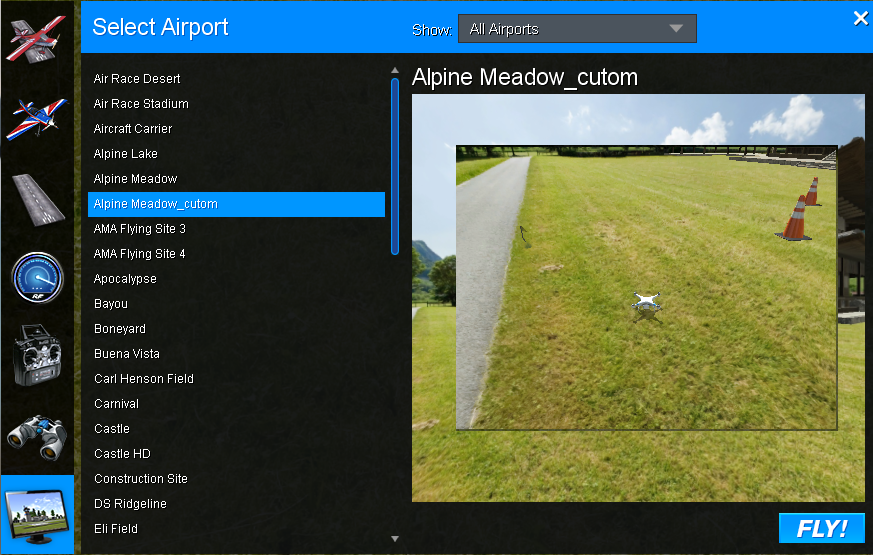
ここでは双眼鏡でみた時のような画が表示できます。遠くに飛行させた時に機体の向きを確認したりする際に役立ちます。
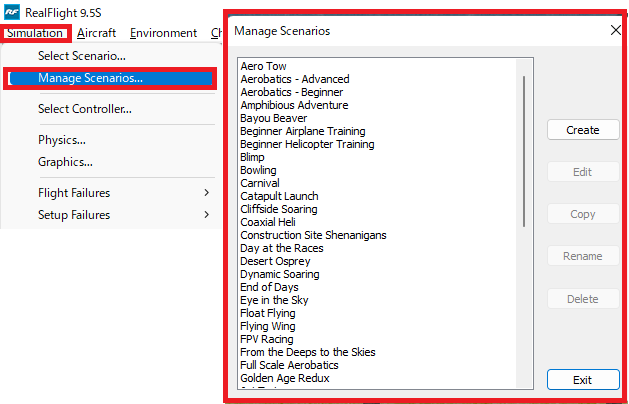
Manage Scenarios
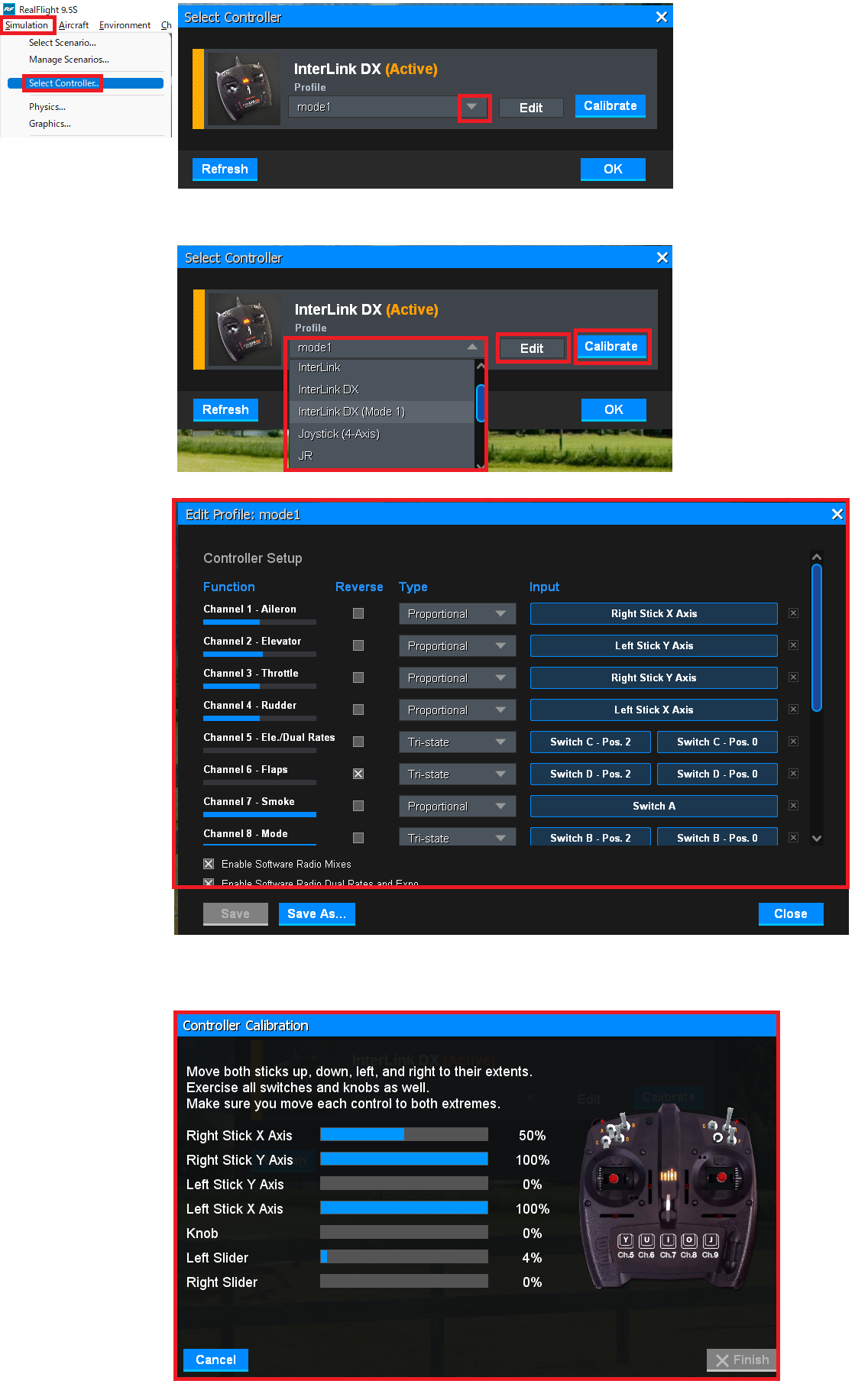
Select Controller
ここではプロポの設定を行っていきます。多くの方がmode1かmode2どちからの設定だと思います。
Editを押して、設定を行います。以下の4chnnel以外は正直設定いらないかなと思います。
各channelのインプットボタンを押して、実際にコントローラーで操作をして決定していきます。
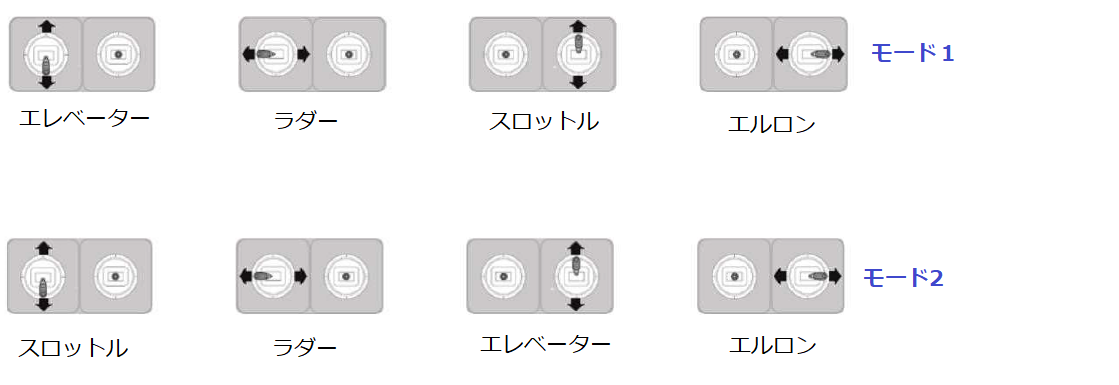
モード1とモード2について賛否両論ありますが、自分の操作のしやすい方を選択しましょう。どちらのモードも利点欠点はありますので、どちらが絶対にいいというのはないです。
また、練習をすれば欠点も克服できます。ただし気を付けたいのは、途中でモードを変えるのは難しいです。慣れたモードから変更するには、また最初から練習が必要となりますので、そこだけは気をつけましょう。
私はモード2から始めましたが、現在はモード1です。モード2が世界標準だとか操作がしやすいという言葉は散々聞いてきましたが、そういう意見は無視していいと思います。世界標準だからって自分が操作しずらかったら全く意味がありません。
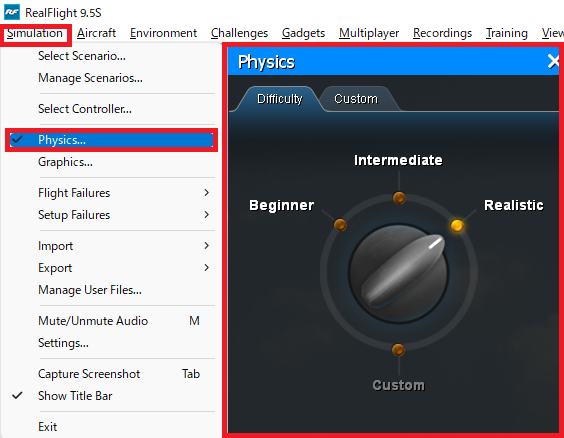
Physics
ここでは、物理設定を行っていきます。
Beginner:初心者モードで燃料切れがなく、クラッシュ判定が甘くなったモード
Intermediate:燃料切れやクラッシュ判定も厳しくなるモード
Realstic:実機に一番近いモード
Graphics
グラフィックスの設定をする事ができます。

Flight Failures
飛行時のトラブルを設定できます。
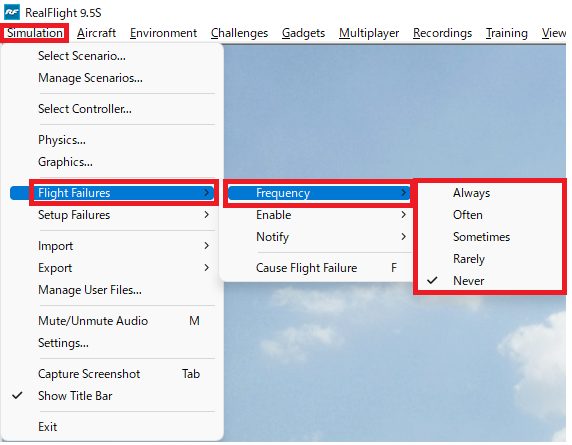
Frequency
Frequencyではトラブル発生の頻度を設定します
Always:常に発生する
Often:よく発生する
Sometimes:たまに発生する
Rarely:めったに発生しない
Never:発生しない
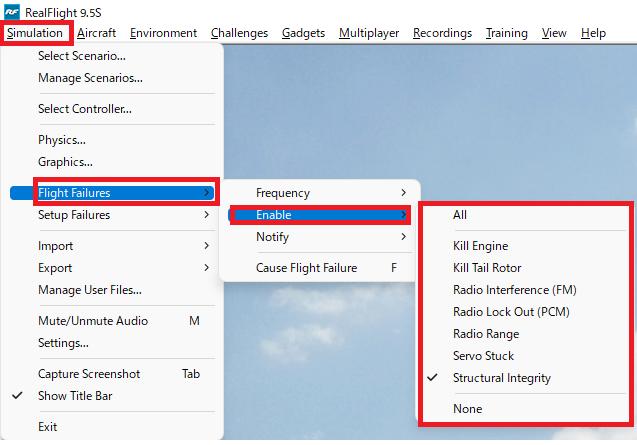
Enable
All
全てのトラブル
Kill Engine
飛行中にエンジンが停止する
Kill Tail Totor(ヘリのみ)
ヘリのテールローターが飛行中に機能しなくなる
Radio Interference(FM)
受信機は断続的な無線干渉を受け、その間サーボが不安定となる
Radio Lockout(PCM)
受信機は断続的な無線切断を受けます。この間機体は操作入力に応答しなくなる
Radio Range
受信機はフライヤーと機体との距離に比例し無線切断が発生します。機体とフライヤーの位置が近い場合は最小限に抑えられ、機体が遠ざかるにつれて無線切断が増加します
Servo Stuck
サーボが動かなくなります。
Structual Integrity
機体強度と飛行中に部品が破損する可能性を設定します。これが発生すると機体が空中分解します。
None
トラブルは発生しません
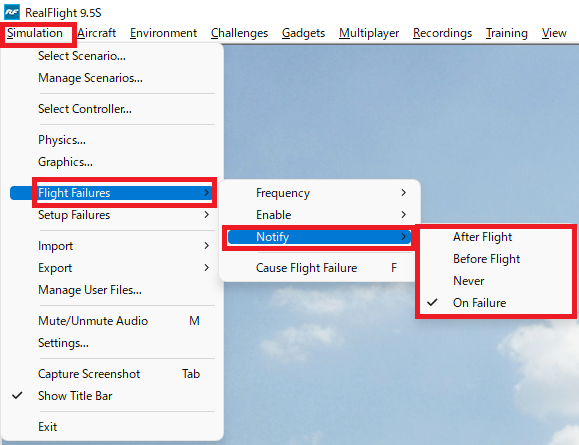
Notify
トラブルの発生に関する通知の設定を行います。
After Flight
フライトの完了時に発生したフライトトラブルについて表示
Before Flight
フライトが始まる前にどのトラブルが発生するか表示
Never
何も表示しない
On Failure
トラブルが発生した時に内容を表示
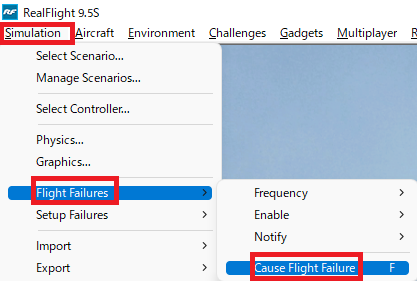
Cause Flight Failure
ここをクリックするかキーボードのFでトラブルを発生させる事ができます
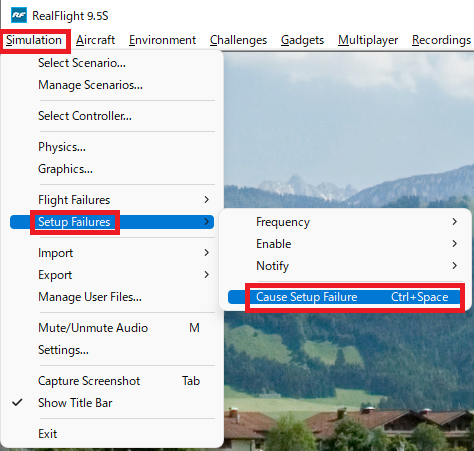
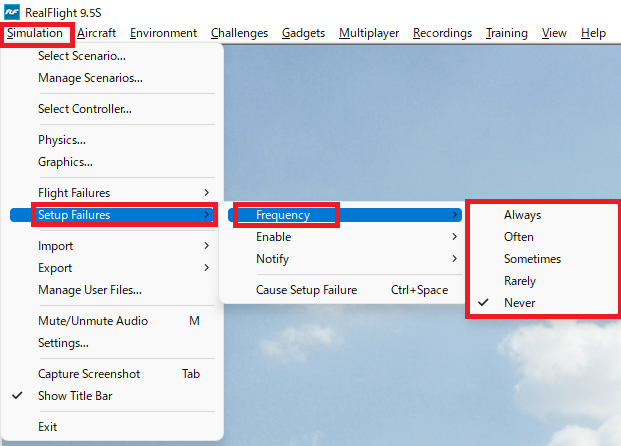
Setup Failures
Setup Failuresでは設定ミスによるトラブルを設定します。
Frequency
Always:常に発生する
Often:よく発生する
Sometimes:たまに発生する
Rarely:めったに発生しない
Never:発生しない
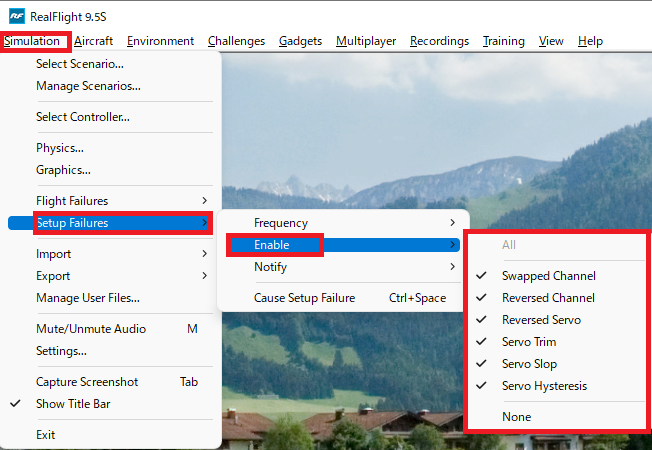
Enable
Enableではトラブル種別を設定します。
All
全ての設定ミスが発生します
Swapped Channel
サーボのチャンネルを間違えた設定。ラダー操作をしているのにスロットルが動作するなど。
Reversed Channel
ランダムに選択されたチャンネルの1つが操作と逆になる。
Reversed Servo
いずれかのサーボの動作が反転
Servo Trim
サーボトリムをずらしコントロールホーンの位置を変更
Servo Slop
リンケージの不適切な取り付けや緩みなどで、舵が正確に動作しない
Servo Hysteresis
フライヤーが操作した際にサーボの動作が遅れ、操作と動作にギャップが発生
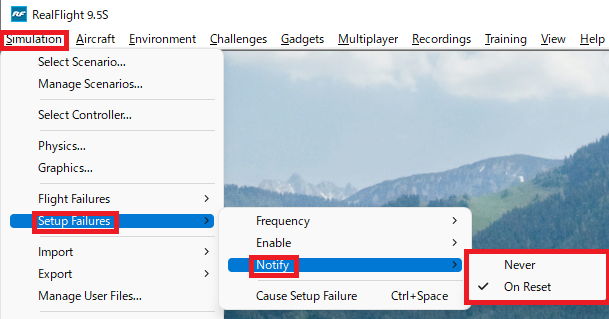
Notify
Never:設定ミスに関して原因を表示しません
On Reset:フライトをリセットした時に原因を通知します(SPACEまたはコントローラーのリセットボタンを押す)
Cause Setup Failure
ここをクリックするかキーボードのCtrl+SPACEでトラブルを発生させる事ができます